前回記事で非絶縁型降圧スイッチングレギュレータ(電流モード制御)の動作モデルを作成しました。
その記事の最後にシミュレーションが何故かうまくいかないよって言って終わりました。
t=1の波形 上から
Vout
IL
Duty
誤差増幅器出力電圧
DUTY=0%~100%に行ったり来たりしています。今回はイライラしながらこれを解決しましたので、その内容を記録します。
なぜふっとぶのか?
↓の誤差増幅器の伝達関数のゼロ点が原因と思います。

シミュレーションがスタートしたら、積分器の入力は5Vです。積分器の出力はランプ波形が出てきます。それが入力されると、、、この1次進み伝達関数が負にどかっと振れます。
なぜ負に振れるのか?はわからん。
ランプ波形が入力されると1/s^2が入力されるってことだから
G(s)=(1+Ts)/s^2=1/s^2+T/sとなる。
T/sはステップ入力の伝達関数だから、、、スパーンと一時的に上側に振れるかもなぁとは思う。
しかも実回路ではありえないほどの負電圧に吹っ飛んでいる。
それを誤差増幅器が一生懸命に誤差を修正しようとして負に振れたのを直そうとしている。
でもそれが負に振れ過ぎていて、気付いたら正に振れまくっている。しかも実回路ではありえないほどの電圧に振り切っている。
そしてそれを誤差増幅器が一生懸命に誤差を修正しようとして、、、の繰り返しをしている
っぽいです。
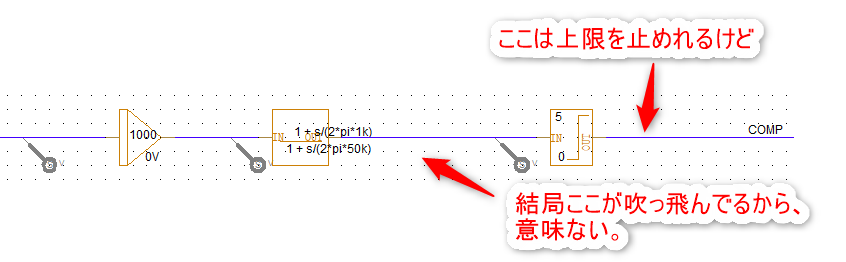
じゃあ、上限を決めてやればいいじゃない。と思いましたが、それの設定がわからない。
“Limit”ブロックがありますが、その手前のLAPLACE出力を制限できないので、意味がないです。
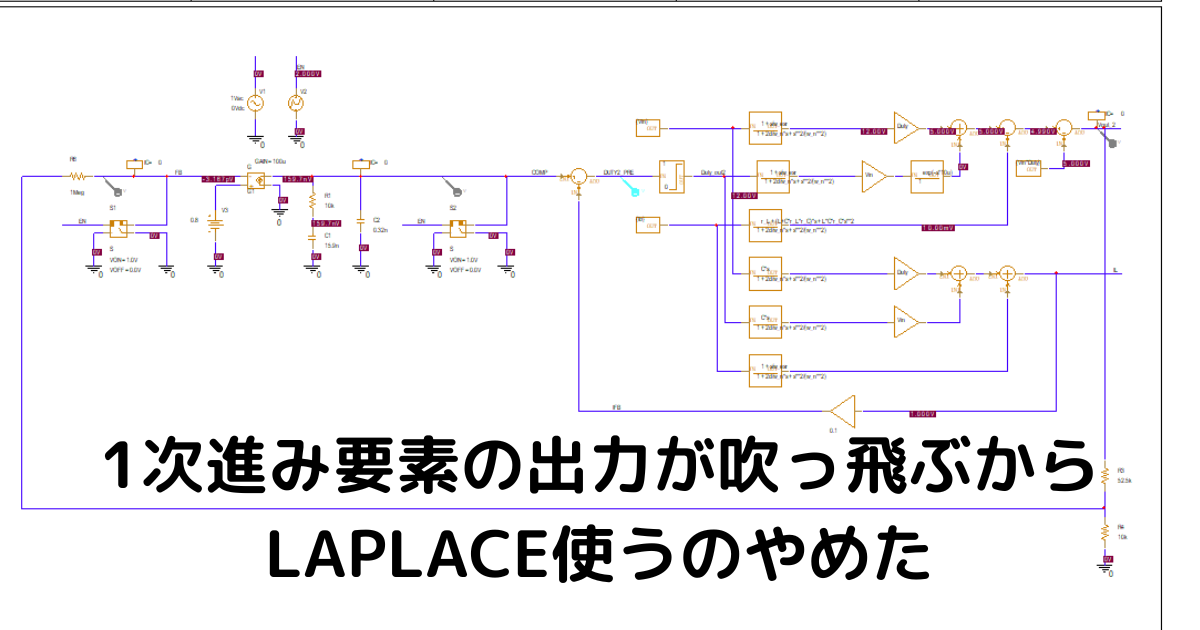
解決した方法
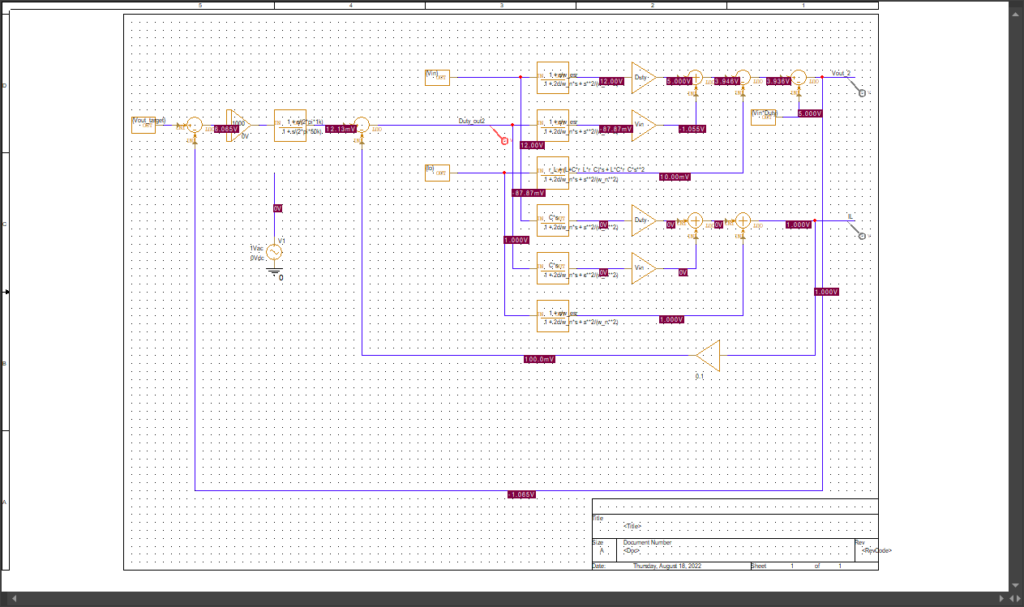
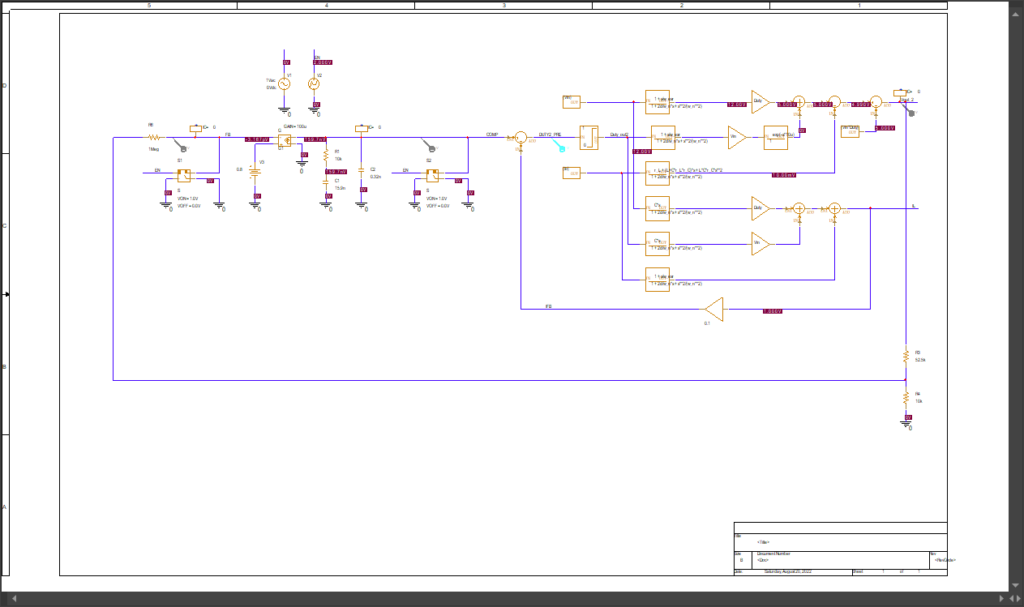
LAPLACEでの表現を辞めて、少し回路に落とし込みました。
Gmアンプは「電圧制御電流源」の理想電源を使用しています。
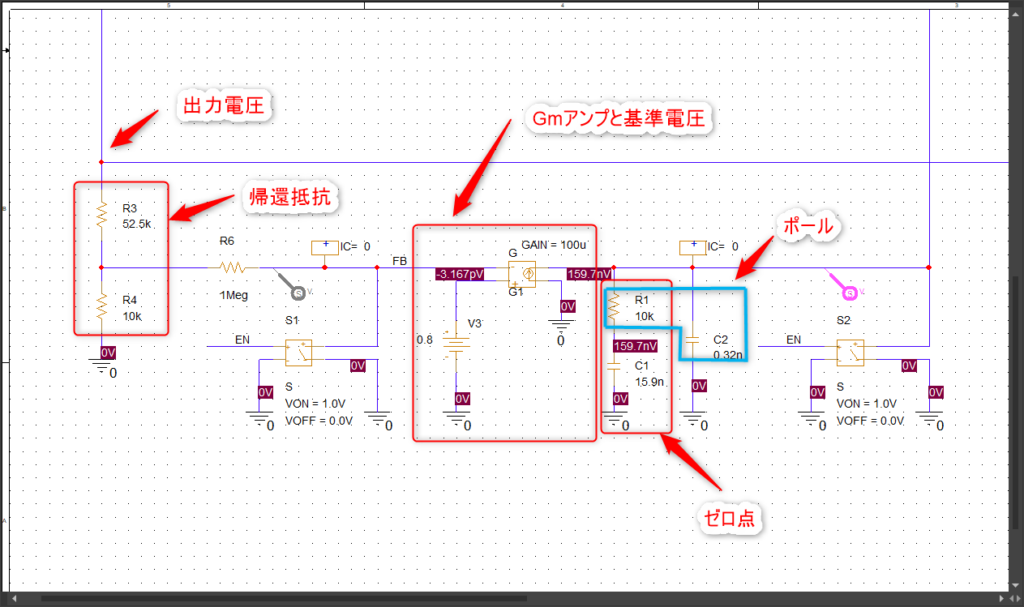
S1,2はENABLE信号がHの間は0Vに固定しておくためのスイッチです。
ENABELがLになったら回路が動き出すってしました。
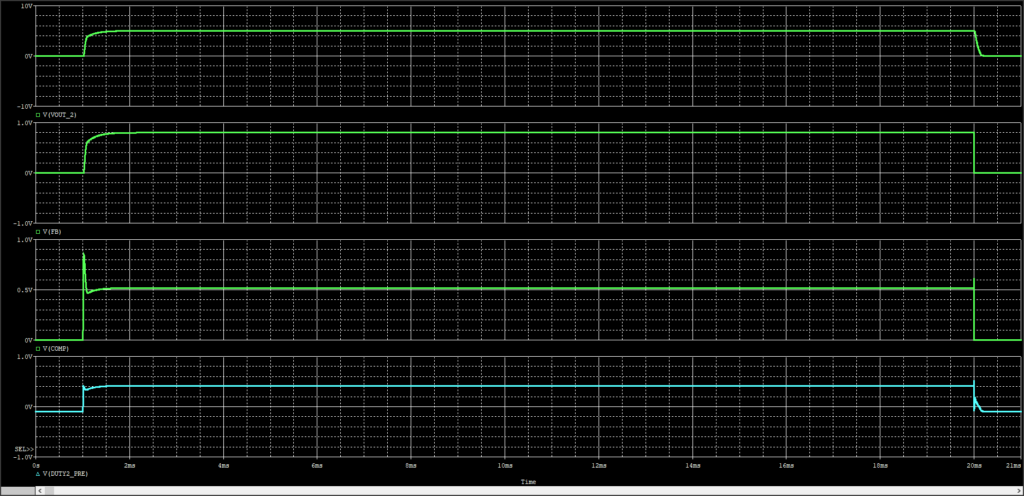
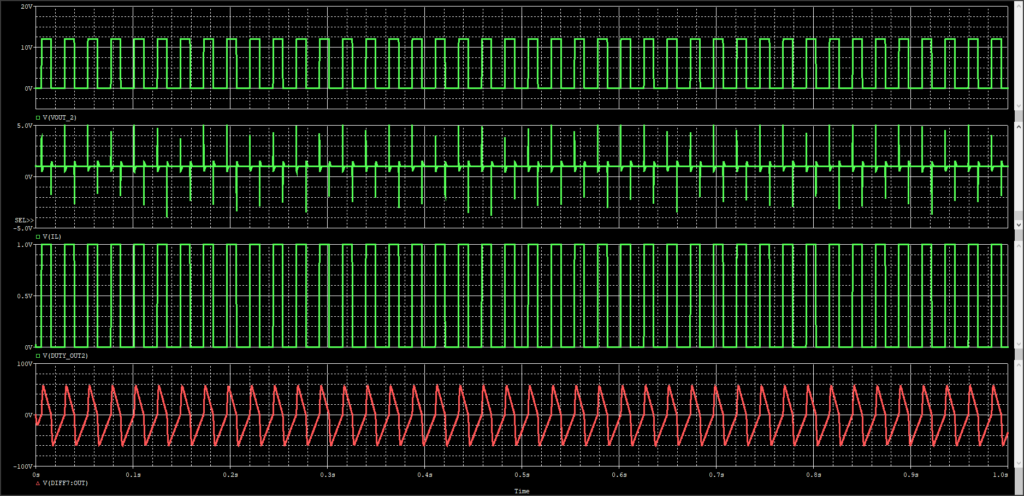
出力電圧
FB電圧(フィードバック電圧)
誤差増幅器出力電圧
DUTY幅[%]
良いですね。t=1msでEN=Lowして、t=20msにEN=Highにしているので、出力がそのタイミングで5Vを出力し始めて、動作が停止していますね。
ちなみにコントローラーと回路図上の定数の関係式を以下に示します。
$$\small{A_o=\frac{R4}{R3+R4}\frac{Gm}{C1}=\frac{10k}{52.5k+10k}\frac{100u}{15.9n}≒1006≒60[dB]}$$
$$\small{fz1=\frac{1}{2piR1C1}=\frac{1}{2pi10k15.9n}=1000.97≒1kHz}$$
$$\small{fp1=\frac{1}{2piR1C2}=\frac{1}{2pi10k0.32n}=49735.9≒50kHz}$$
周波数特性もほぼ同じです↓。
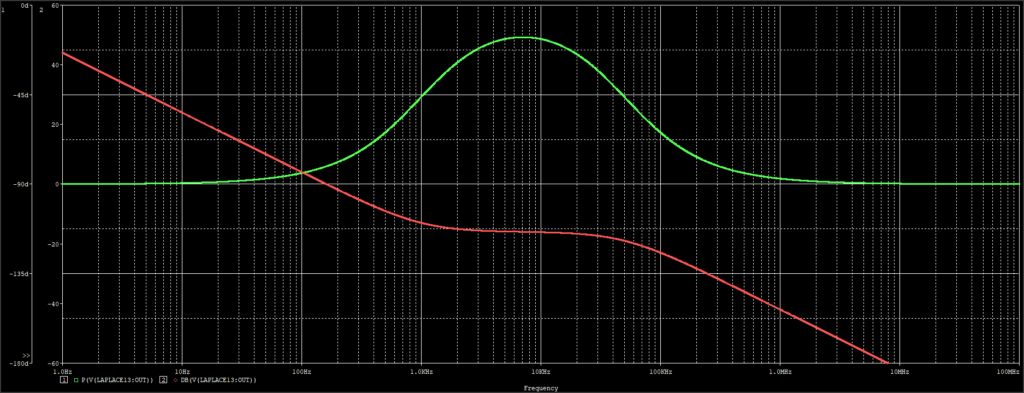
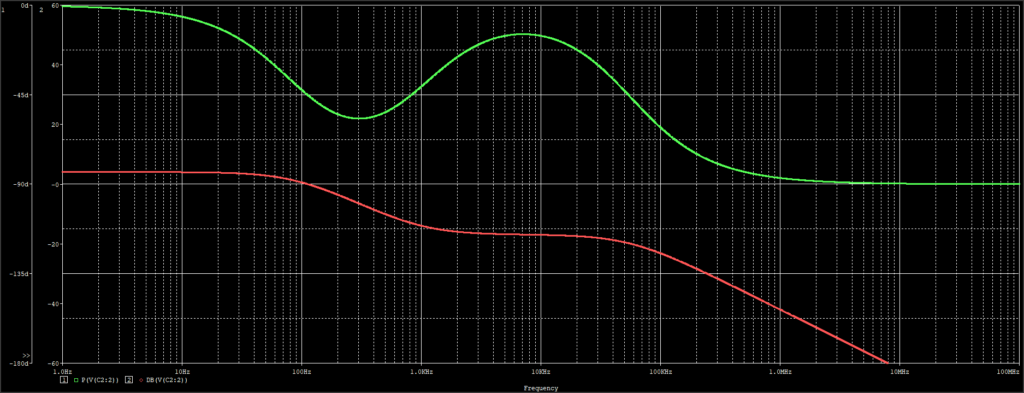
低域が違うじゃん!!!なんででしょうね。理想電源がいかんのですかねぇ。まぁ高域の安定性判別する箇所ではほぼほぼ同じになっているから問題なしです。
はい、本記事は以上になります。
最後までお読みいただきありがとうございました!!