みなさま、お疲れ様です。
本記事は非絶縁降圧スイッチングレギュレータの勉強をしてみよう。という記事の第7回目です。
1回目:【電源回路基礎】非絶縁降圧スイッチングレギュレータの動作原理
2回目:【電源回路基礎】MOSFETがどうやってONするかを知って欲しい
3回目:【電源回路基礎】非絶縁降圧スイッチングレギュレータの設計手順①(パワーライン編)
4回目:【電源回路基礎】非絶縁降圧スイッチングレギュレータの出力がなぜ一定になるのか?
5回目:【電源回路基礎】スイッチングレギュレータの安定、不安定とは?
6回目:【電源回路基礎】非絶縁降圧スイッチングレギュレータの制御方法(電圧モードと電流モード)
7回目:【制御工学】状態平均化法による非絶縁型降圧スイッチングレギュレータの伝達関数の導出(本記事)
8回目:【制御工学】Type3補償器の超簡単な設計方法【実例あり】
9回目:【電源回路基礎】非絶縁降圧スイッチングレギュレータの設計手順(制御設計 ピーク電流モード編)
今回は以下のような非絶縁型の降圧スイッチングレギュレータの伝達関数を状態平均化法を用いて導出します。
- 降圧スイッチングレギュレータの伝達関数
- 状態平均化法を使った導出方法
- その計算過程
スイッチングレギュレータの制御設計をしたり、動作モデルを作ったりするのに便利な知識ですので、良かったら読んでみて下さい。
答えだけ知りたいよ!という方に先に導出結果の伝達関数を提示しておきます。
出力電圧に関する伝達関数は以下の通り
$$\small{\frac{ΔVout(s)}{ΔVin}=G_{vv}=\frac{1}{P(s)} \left( 1+\frac{s}{ω_{esr}} \right) Duty}$$
$$\small{\frac{ΔVout(s)}{ΔDuty}=G_{dv}=\frac{1}{P(s)} \left( 1+\frac{s}{ω_{esr}} \right) Vin}$$
$$\small{\frac{ΔVout(s)}{ΔIo}=G_{iv}=-\frac{1}{P(s)} \left( s^2LCr_C+s(L+Cr_Lr_C)+r_L \right)}$$
出力コイル電流に関する伝達関数は以下の通り
$$\small{\frac{ΔIL(s)}{ΔVin}=G_{vi}=\frac{C*Duty*s}{P(s)}}$$
$$\small{\frac{ΔIL(s)}{ΔIo}=G_{ii}=\frac{\frac{s}{ω_{esr}}+1}{P(s)}}$$
$$\small{\frac{ΔIL(s)}{ΔDuty}=G_{di}=\frac{C*Vin*s}{P(s)}}$$
ただし
$$\small{P(s)=\frac{s^2}{ω_n^2}+\frac{2δ}{ω_n}s+1}$$
$$\small{ω_n=\frac{1}{\sqrt{LC}},δ=\frac{r_L+r_C}{2}\sqrt{\frac{C}{L}},ωesr=\frac{1}{Cr_C}}$$
Vin:入力電圧[V]、Vout:出力電圧[V]、Duty:スイッチングON DUTY[%]、L:出力コイルインダクタンス値[H]、C:出力コンデンサ容量値[F]、r_L:インダクタのDCR[Ω]、r_C:コンデンサのESR[Ω]、Io:出力電流[A]
導出までの流れを最初に書いておきます。
- スイッチONとOFFのときの回路方程式を書き出す。
- 1の方程式を状態変数=(iL,vc)、入力=(Vin,Io)、出力=(vout)の状態空間表現で書き直す。
iL:コイル電流、vc:コンデンサ電圧、Vin:入力電圧、Io:出力電流、vout:出力電圧 - 2のONとOFFのときの状態空間表現をDutyで加重平均する。
- 定常解を求める。
- 定常状態から微小変動が生じたときの式にする。
- 5の式をラプラス変換する。
- 6の式を整理してΔvout/ΔD、Δvout/ΔIo、Δvout/ΔVinと3つの入力に対する伝達関数を得る。
では、やってみましょう。
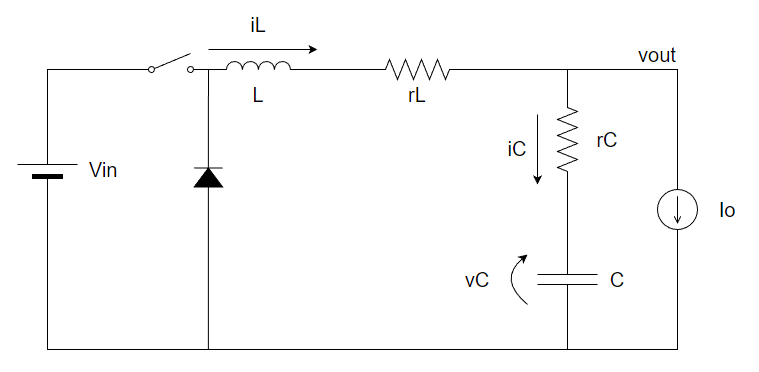
スイッチONとOFFのときの回路方程式を書き出す
スイッチON時
$$\small{Vin=v_C(t)+r_Ci_C(t)+i_L(t)r_L+L\frac{di_L(t)}{dt}}$$
$$\small{v_{out}=v_C(t)+r_Ci_C(t)}$$
$$\small{i_L(t)=I_o+i_C(t)}$$
$$\small{i_C(t)=C\frac{dv_C(t)}{dt}}$$
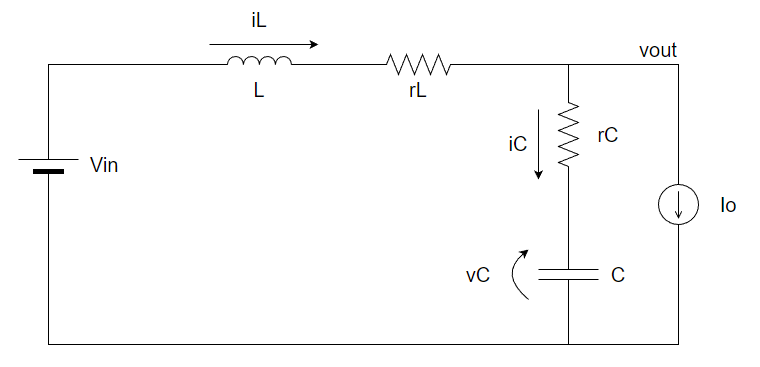
スイッチOFF時
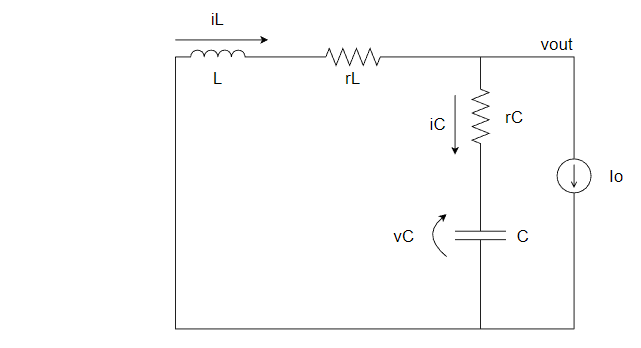
$$\small{0=v_C(t)+r_Ci_C(t)+i_L(t)r_L+L\frac{di_L(t)}{dt}}$$
$$\small{v_{out}=v_C(t)+r_Ci_C(t)}$$
$$\small{i_L(t)=I_o+i_C(t)}$$
$$\small{i_C(t)=C\frac{dv_C(t)}{dt}}$$
違いは最初の式の左辺がVinか0かの違いです。
回路方程式を状態空間表現に書き直す
状態空間表現は以下のような式です。
\begin{eqnarray}
\small{\dot{x}(t)=Ax(t)+Bu(t)\\
y(t)=Cx(t)+Du(t)}
\end{eqnarray}
これに状態変数xと入力uと出力yをそれぞれ以下とします。
$$\small{x(t)=\begin{bmatrix}
i_L(t)\\
v_C(t)
\end{bmatrix},u(t)=\begin{bmatrix}
Vin\\
Io
\end{bmatrix},y(t)=v_{out}(t)}$$
回路方程式を行列表現できるように変換していきます。
スイッチON時
$$\small{Vin=v_C(t)+r_Ci_C(t)+i_L(t)r_L+L\frac{di_L(t)}{dt}}$$
diL/dt=にします。
$$\small{L\frac{di_L(t)}{dt}=Vin-v_C(t)-r_Ci_C(t)-i_L(t)r_L}$$
iC=iL-Ioを代入して、整理する。
$$\small{L\frac{di_L(t)}{dt}=Vin-v_C(t)-r_C(i_L(t)-Io)-i_L(t)r_L\\
L\frac{di_L(t)}{dt}=Vin-v_C(t)-r_Ci_L(t)+r_CIo-i_L(t)r_L\\
L\frac{di_L(t)}{dt}=-(r_L+r_C)i_L(t)-v_C(t)+Vin+r_CIo}$$
Lで割る。
$$\small{\frac{di_L(t)}{dt}=-\frac{r_L+r_C}{L}i_L(t)-\frac{1}{L}v_C(t)+\frac{1}{L}Vin+\frac{r_C}{L}Io\tag{1}}$$
これでdL(t)/dtはOK。次にdvc(t)/dtを式変換していく。
$$\small{i_C(t)=C\frac{dv_C(t)}{dt}\\
\frac{dv_C(t)}{dt}=\frac{i_C(t)}{C}}$$
iC=iL-Ioを代入して、整理する。
$$\small{\frac{dv_C(t)}{dt}=\frac{(i_L(t)-Io)}{C}}$$
$$\small{\frac{dv_C(t)}{dt}=\frac{1}{C}i_L(t)-\frac{1}{C}Io}\tag{2}$$
これでdvc(t)/dtはOK。次にvoutを式変換していく。
$$\small{v_{out}=v_C(t)+r_Ci_C(t)}$$
iC=iL-Ioを代入して、整理する。
$$\small{v_{out}=v_C(t)+r_C(i_L(t)-Io)}$$
$$\small{v_{out}=r_Ci_L(t)+v_C(t)-r_CIo\tag{3}}$$
(1),(2),(3)からスイッチON時の状態空間表現は以下の通りになります。
$$\small{\frac{d}{dt}\begin{bmatrix}i_L(t)\\v_C(t)\end{bmatrix}=
\begin{bmatrix}-\frac{r_L+r_C}{L}&&-\frac{1}{L}\\\frac{1}{C}&&0\end{bmatrix}\begin{bmatrix}i_L(t)\\v_C(t)\end{bmatrix}+\begin{bmatrix}\frac{1}{L}&&\frac{r_C}{L}\\0&&-\frac{1}{C}\end{bmatrix}\begin{bmatrix}Vin\\Io\end{bmatrix}\\
v_{out}(t)=\begin{bmatrix}r_C&&1\end{bmatrix}\begin{bmatrix}i_L(t)\\v_C(t)\end{bmatrix}+\begin{bmatrix}0&&-r_C\end{bmatrix}\begin{bmatrix}Vin\\Io\end{bmatrix}}\tag{4}$$
疲れますね。次がスイッチOFF時です。
スイッチOFF時
$$\small{0=v_C(t)+r_Ci_C(t)+i_L(t)r_L+L\frac{di_L(t)}{dt}}$$
diL/dt=にします。
$$\small{L\frac{di_L(t)}{dt}=-v_C(t)-r_Ci_C(t)-i_L(t)r_L}$$
iC=iL-Ioを代入して、整理する。
$$\small{L\frac{di_L(t)}{dt}=-v_C(t)-r_C(i_L(t)-I_o)-i_L(t)r_L\\
L\frac{di_L(t)}{dt}=-v_C(t)-r_Ci_L(t)+r_CI_o-i_L(t)r_L\\
L\frac{di_L(t)}{dt}=-(r_L+r_C)i_L(t)-v_C(t)+r_CI_o}$$
Lで割る。
$$\small{\frac{di_L(t)}{dt}=-\frac{r_L+r_C}{L}i_L(t)-\frac{1}{L}v_C(t)+\frac{r_C}{L}I_o\tag{5}}$$
これでdL(t)/dtはOK。次にdvc(t)/dtを式変換していく。
$$\small{i_C(t)=C\frac{dv_C(t)}{dt}\\
\frac{dv_C(t)}{dt}=\frac{i_C(t)}{C}}$$
iC=iL-Ioを代入して、整理する。
$$\small{\frac{dv_C(t)}{dt}=\frac{(i_L(t)-Io)}{C}}$$
$$\small{\frac{dv_C(t)}{dt}=\frac{1}{C}i_L(t)-\frac{1}{C}Io\tag{6}}$$
これでdvc(t)/dtはOK。次にvoutを式変換していく。
$$\small{v_{out}=v_C(t)+r_Ci_C(t)}$$
iC=iL-Ioを代入して、整理する。
$$\small{v_{out}=v_C(t)+r_C(i_L(t)-Io)}$$
$$\small{v_{out}=r_Ci_L(t)+v_C(t)-r_CIo\tag{7}}$$
(5),(6),(7)からスイッチOFF時の状態空間表現は以下の通りになります。
$$\small{\frac{d}{dt}\begin{bmatrix}i_L(t)\\v_C(t)\end{bmatrix}=
\begin{bmatrix}-\frac{r_L+r_C}{L}&&-\frac{1}{L}\\\frac{1}{C}&&0\end{bmatrix}\begin{bmatrix}i_L(t)\\v_C(t)\end{bmatrix}+\begin{bmatrix}0&&\frac{r_C}{L}\\0&&-\frac{1}{C}\end{bmatrix}\begin{bmatrix}Vin\\Io\end{bmatrix}\\
v_{out}(t)=\begin{bmatrix}r_C&&1\end{bmatrix}\begin{bmatrix}i_L(t)\\v_C(t)\end{bmatrix}+\begin{bmatrix}0&&-r_C\end{bmatrix}\begin{bmatrix}Vin\\Io\end{bmatrix}}\tag{8}$$
はぁ疲れましたね。スイッチON/OFF時のそれぞれの状態空間表現をまとめると以下になります。
| SW=ON | $$\small{\frac{d}{dt}\begin{bmatrix}i_L(t)\\v_C(t)\end{bmatrix}= \begin{bmatrix}-\frac{r_L+r_C}{L}&&-\frac{1}{L}\\\frac{1}{C}&&0\end{bmatrix}\begin{bmatrix}i_L(t)\\v_C(t)\end{bmatrix}+\begin{bmatrix}\frac{1}{L}&&\frac{r_C}{L}\\0&&-\frac{1}{C}\end{bmatrix}\begin{bmatrix}Vin\\Io\end{bmatrix}\\ v_{out}(t)=\begin{bmatrix}r_C&&1\end{bmatrix}\begin{bmatrix}i_L(t)\\v_C(t)\end{bmatrix}+\begin{bmatrix}0&&-r_C\end{bmatrix}\begin{bmatrix}Vin\\Io\end{bmatrix}}$$ |
| SW=OFF | $$\small{\frac{d}{dt}\begin{bmatrix}i_L(t)\\v_C(t)\end{bmatrix}= \begin{bmatrix}-\frac{r_L+r_C}{L}&&-\frac{1}{L}\\\frac{1}{C}&&0\end{bmatrix}\begin{bmatrix}i_L(t)\\v_C(t)\end{bmatrix}+\begin{bmatrix}0&&\frac{r_C}{L}\\0&&-\frac{1}{C}\end{bmatrix}\begin{bmatrix}Vin\\Io\end{bmatrix}\\ v_{out}(t)=\begin{bmatrix}r_C&&1\end{bmatrix}\begin{bmatrix}i_L(t)\\v_C(t)\end{bmatrix}+\begin{bmatrix}0&&-r_C\end{bmatrix}\begin{bmatrix}Vin\\Io\end{bmatrix}}$$ |
$$\small{A_{ON}=\begin{bmatrix}-\frac{r_L+r_C}{L}&&-\frac{1}{L}\\\frac{1}{C}&&0\end{bmatrix},
A_{OFF}=\begin{bmatrix}-\frac{r_L+r_C}{L}&&-\frac{1}{L}\\\frac{1}{C}&&0\end{bmatrix}\\
B_{ON}=\begin{bmatrix}\frac{1}{L}&&\frac{r_C}{L}\\0&&-\frac{1}{C}\end{bmatrix},
B_{OFF}=\begin{bmatrix}0&&\frac{r_C}{L}\\0&&-\frac{1}{C}\end{bmatrix}\\
C_{ON}=\begin{bmatrix}r_C&&1\end{bmatrix},
C_{OFF}=\begin{bmatrix}r_C&&1\end{bmatrix}\\
D_{ON}=\begin{bmatrix}0&&-r_C\end{bmatrix},
D_{OFF}=\begin{bmatrix}0&&-r_C\end{bmatrix}}$$
Bの左上の項だけONとOFFで違いますね。これをDUTYで平均を取ります。
ONとOFFのときの状態空間表現をDutyで加重平均する
DUTYで平均を取ります。具体的には
$$\small{A=Duty*A_{ON}+(1-Duty)*A_{OFF}\\
B=Duty*B_{ON}+(1-Duty)*B_{OFF}\\
C=Duty*C_{ON}+(1-Duty)*C_{OFF}\\
D=Duty*D_{ON}+(1-Duty)*D_{OFF}}$$
をします。B以外はONとOFFで中身は変わりません。したがって、加重平均した結果も変わりません。なので、Bのみを考慮すればOKです。
$$\small{B=Duty*B_{ON}+(1-Duty)*B_{OFF}\\
B=Duty\begin{bmatrix}\frac{1}{L}&&\frac{r_C}{L}\\0&&-\frac{1}{C}\end{bmatrix}+(1-Duty)\begin{bmatrix}0&&\frac{r_C}{L}\\0&&-\frac{1}{C}\end{bmatrix}\\
B=\begin{bmatrix}\frac{Duty}{L}&&\frac{r_C}{L}\\0&&-\frac{1}{C}\end{bmatrix}}$$
したがって、Dutyで加重平均した状態空間表現は以下のようになります。
$$\small{\frac{d}{dt}\begin{bmatrix}i_L(t)\\v_C(t)\end{bmatrix}=
\begin{bmatrix}-\frac{r_L+r_C}{L}&&-\frac{1}{L}\\\frac{1}{C}&&0\end{bmatrix}\begin{bmatrix}i_L(t)\\v_C(t)\end{bmatrix}+\begin{bmatrix}\frac{Duty}{L}&&\frac{r_C}{L}\\0&&-\frac{1}{C}\end{bmatrix}\begin{bmatrix}Vin\\Io\end{bmatrix}\\
v_{out}(t)=\begin{bmatrix}r_C&&1\end{bmatrix}\begin{bmatrix}i_L(t)\\v_C(t)\end{bmatrix}+\begin{bmatrix}0&&-r_C\end{bmatrix}\begin{bmatrix}Vin\\Io\end{bmatrix}}$$
定常解を求める
定常解とは時間に依存せずに一定となっているときの状態です。dx/dt=0とすると計算できます。計算結果は良く見る形になります。
計算過程は単純なので省略しますが、定常解は以下になります。
$$\small{V_{out}=DutyVin-I_or_L}$$
定常状態の状態空間表現を大文字で書き直すと、、、
\begin{eqnarray}
\small{\dot{X}(t)=AX(t)+BU(t)}\\
\small{Y(t)=CX(t)+DU(t)}
\end{eqnarray}
これに微小変動が生じたときを考えると伝達関数を導くことが出来ます。
定常状態から微小変動が生じたときの式にする
この式↓を微小変動が発生した時を考えます。微小変動は+Δで表現します。
$$\small{\dot{X}(t)=AX(t)+BU(t)}$$
$$\small{\dot{X}(t)+Δ\dot{X}(t)=(A+ΔA)(X(t)+ΔX(t))+(B+ΔB)(U(t)+ΔU(t))}$$
展開します。
$$\scriptsize{\dot{X}(t)+Δ\dot{X}(t)=AX(t)+AΔX(t)+ΔAX(t)+ΔAΔX(t)+BU(t)+BΔU(t)+ΔBU(t)+ΔBΔU(t)}$$
微小項(Δ*Δ)の項目はちっちゃいので無視します。
$$\scriptsize{\dot{X}(t)+Δ\dot{X}(t)=AX(t)+AΔX(t)+ΔAX(t)+BU(t)+BΔU(t)+ΔBU(t)}$$
ここで見たいのは定常解から変動が起きたときにどうなるか?を知りたいので、静特性(定常解)部分は無視します。つまり
$$\small{\dot{X}(t)=AX(t)+BU(t)}$$
部分は消します。
$$\small{Δ\dot{X}(t)=AΔX(t)+ΔAX(t)+BΔU(t)+ΔBU(t)}$$
ΔAについて考えます。Aの中身は全て定数なのでAに微小変動ΔAは存在しません。
$$\small{A=\begin{bmatrix}-\frac{r_L+r_C}{L}&&-\frac{1}{L}\\\frac{1}{C}&&0\end{bmatrix}}$$
つまりAの微分ΔAは0になります。
$$\small{Δ\dot{X}(t)=AΔX(t)+BΔU(t)+ΔBU(t)}$$
次にΔBですが、BはDutyを変数とした関数です。なのでDutyで偏微分したものがΔBになります。
$$\small{Δ\dot{X}(t)=AΔX(t)+BΔU(t)+\frac{\partial B}{\partial Duty}U(t)ΔDuty(t)}$$
同様にY(t)=Vout(t)についても微小変動を起こした時
$$\scriptsize{Vout(t)+ΔVout(t)=(C+ΔC)(X(t)+ΔX(t))+(D+ΔD)(U(t)+ΔU(t))\\
Vout(t)+ΔVout(t)=CX(t)+CΔX(t)+ΔCX(t)+ΔCΔX(t)+DU(t)+DΔU(t)+ΔDU(t)+ΔDΔU(t)}$$
同様に微小変動ΔΔは無視します。
$$\scriptsize{Vout(t)+ΔVout(t)=CX(t)+CΔX(t)+ΔCX(t)+DU(t)+DΔU(t)+ΔDU(t)}$$
同様に定常解のVout(t)=CX(t)+DU(t)は消します。
$$\small{ΔVout(t)=CΔX(t)+ΔCX(t)+DΔU(t)+ΔDU(t)}$$
CとDは定数なので、微分したら0です。なのでΔCもΔDも0です。
$$\small{ΔVout(t)=CΔX(t)+DΔU(t)}$$
まとめると微小変動が生じたとき内部状態や出力の変化量は以下の式で求まります。
\begin{eqnarray}
\small{Δ\dot{X}(t)=AΔX(t)+BΔU(t)+\frac{\partial B}{\partial Duty}U(t)ΔDuty(t)}\\
\small{ΔVout(t)=CΔX(t)+DΔU(t)}
\end{eqnarray}
ラプラス変換する
上の式をラプラス変換します。
\begin{eqnarray}
\small{sIΔX(s)=AΔX(s)+BΔU(s)+\frac{\partial B}{\partial Duty}U(s)ΔDuty(s)}\\
\small{ΔVout(s)=CΔX(s)+DΔU(s)}
\end{eqnarray}
とりあえず上の式をΔX(s)=~の形に整理します。
$$\small{ΔX(s)=(sI-A)^{-1}(BΔU(s)+\frac{\partial B}{\partial Duty}U(s)ΔDuty(s))}\tag{12}$$
式を整理する
ΔX(s)=の式からΔILの式を導出
まずはΔX(s)の式を解いてΔILを導出していきます。
sI-Aについて計算します。
$$\small{sI-A=\begin{bmatrix}s&&0\\0&&s\end{bmatrix}-\begin{bmatrix}-\frac{r_L+r_C}{L}&&-\frac{1}{L}\\\frac{1}{C}&&0\end{bmatrix}=\begin{bmatrix}s+\frac{r_L+r_C}{L}&&\frac{1}{L}\\-\frac{1}{C}&&s\end{bmatrix}}$$
(sI-A)^-1を計算します。↑の逆行列ですね。
$$\small{(sI-A)^{-1}=\frac{1}{ad-bc}\begin{bmatrix}s&&\ -\frac{1}{L}\\ \frac{1}{C}&&s+\frac{r_L+r_C}{L}\end{bmatrix}}$$
逆行列の先頭1/(ad-bc)を計算します。
$$\scriptsize{ad-bc=\left(\left(s+\frac{r_L+r_C}{L}\right)*s+\frac{1}{LC}\right)=s^2+\frac{r_L+r_C}{L}s+\frac{1}{LC}}$$
これを2次ポールの標準形で表現する。それで標準形をP(s)とする。
$$\scriptsize{=s^2+\frac{r_L+r_C}{L}s+\frac{1}{LC}=ω_n^2\left(\frac{s^2}{ω_n^2}+\frac{2δ}{ω_n}s+1\right)=ω_n^2P(s)}$$
ただし
$$\small{2δω_n=\frac{r_L+r_C}{L},ω_n^2=\frac{1}{LC}}$$
つまり
$$\small{ω_n=\frac{1}{\sqrt{LC}},δ=\frac{r_L+r_C}{2}\sqrt{\frac{C}{L}}}$$
これをもとの(sI-A)^-1に戻すと
$$\small{(sI-A)^{-1}=\frac{1}{ω_n^2P(s)}\begin{bmatrix}s&&\ -\frac{1}{L}\\ \frac{1}{C}&&s+\frac{r_L+r_C}{L}\end{bmatrix}}\tag{10}$$
続いて、偏微分のところを計算します。
$$\small{\frac{\partial}{\partial Duty}BU(s)ΔDuty(s)=\frac{\partial}{\partial Duty}\begin{bmatrix}\frac{Duty}{L}&&\frac{r_C}{L}\\0&&-\frac{1}{C}\end{bmatrix}U(s)ΔDuty(s)\\
=\begin{bmatrix}\frac{1}{L}&&0\\0&&0\end{bmatrix}U(s)ΔDuty(s)}$$
単純にDuty部分が微分されて1が残り、他の定数は微分されて0です。U(s)は定常状態のVin、Ioです。展開します。
$$\small{=\begin{bmatrix}\frac{1}{L}&&0\\0&&0\end{bmatrix}\begin{bmatrix}Vin\\Io\end{bmatrix}ΔDuty(s)\\
=\frac{Vin}{L}ΔDuty}\tag{11}$$
(9)式に(10),(11)を入れて整理します。
$$\small{ΔX(s)=\frac{1}{ω_n^2P(s)}\begin{bmatrix}s&&\ -\frac{1}{L}\\ \frac{1}{C}&&s+\frac{r_L+r_C}{L}\end{bmatrix}\left(BΔU(s)+\frac{Vin}{L}ΔDuty\right)\\
ΔX(s)=\frac{1}{ω_n^2P(s)}\begin{bmatrix}s&&\ -\frac{1}{L}\\ \frac{1}{C}&&s+\frac{r_L+r_C}{L}\end{bmatrix} \left( \begin{bmatrix}\frac{Duty}{L}&&\frac{r_C}{L}\\0&&-\frac{1}{C}\end{bmatrix}\begin{bmatrix}ΔVin\\ΔIo\end{bmatrix}+\frac{Vin}{L}ΔDuty \right) }$$
あとちょっと
$$\scriptsize{ΔX(s)=\frac{1}{ω_n^2P(s)}\begin{bmatrix}s&&\ -\frac{1}{L}\\ \frac{1}{C}&&s+\frac{r_L+r_C}{L}\end{bmatrix}\left( \begin{bmatrix}\frac{Duty}{L}\\0\end{bmatrix}ΔVin+\begin{bmatrix}\frac{r_C}{L}\\-\frac{1}{C}\end{bmatrix}ΔIo+\begin{bmatrix}\frac{Vin}{L}\\0\end{bmatrix}ΔDuty \right)}\tag{12}$$
といい感じに入力Vin,Io,Dutyそれぞれの微小変動が生じたときの状態x(s)の変動が求まりました。
X(s)はiLとvcのことです。なので(12)式の行列の上側だけを展開するとΔILに関する式が取り出せます。
$$\scriptsize{ΔX(s)=\begin{bmatrix}Δi_L(s)\\Δv_C(s)\end{bmatrix}=\frac{1}{ω_n^2P(s)}\begin{bmatrix}s&&\ -\frac{1}{L}\\ \frac{1}{C}&&s+\frac{r_L+r_C}{L}\end{bmatrix}\left( \begin{bmatrix}\frac{Duty}{L}\\0\end{bmatrix}ΔVin+\begin{bmatrix}\frac{r_C}{L}\\-\frac{1}{C}\end{bmatrix}ΔIo+\begin{bmatrix}\frac{Vin}{L}\\0\end{bmatrix}ΔDuty \right)}$$
行列の上側だけを展開します。
$$\scriptsize{
Δi_L=\frac{1}{ω_n^2P(s)}\left(
\frac{Dutys}{L}ΔVin
+\left(\frac{r_Cs}{L}+\frac{1}{LC}\right)ΔIo
+\frac{Vins}{L}ΔDuty
\right)
}$$
ωn^2=1/LCなので1/ωn^2=LCです。なので1/ωnを展開してLCを各項に掛けます。
$$\small{
Δi_L=\frac{1}{P(s)}\left(
CDutysΔVin
+\left(Cr_Cs+1\right)ΔIo
+CVinsΔDuty
\right)
}$$
ωesr=1/Crcとします。
$$\small{
Δi_L=\frac{1}{P(s)}\left(
CDutysΔVin
+\left(\frac{s}{ω_{esr}}+1\right)ΔIo
+CVinsΔDuty
\right)
}\tag{13}$$
はい、終わりです。
この式を見てもらうとVin,Duty,Ioの微小変動に対してコイル電流がどう変化するか?を示している式になります。
ΔVout(s)=を解いて出力電圧の変動を導出する
同じようにΔVout(s)=の式を整理していきます。
$$\small{ΔVout(s)=CΔX(s)+DΔU(s)}$$
$$\tiny{ΔVout(s)=\begin{bmatrix}r_C&&1\end{bmatrix}\frac{1}{ω_n^2P(s)}\begin{bmatrix}s&&\ -\frac{1}{L}\\ \frac{1}{C}&&s+\frac{r_L+r_C}{L}\end{bmatrix}
\left( \begin{bmatrix}\frac{Duty}{L}\\0\end{bmatrix}ΔVin+\begin{bmatrix}\frac{r_C}{L}\\-\frac{1}{C}\end{bmatrix}ΔIo+\begin{bmatrix}\frac{Vin}{L}\\0\end{bmatrix}ΔDuty \right)
+\begin{bmatrix}0&&-r_C\end{bmatrix}\begin{bmatrix}ΔVin\\ΔIo\end{bmatrix}}$$
あ~もう嫌になる。{}内に行列を展開する。
$$\tiny{ΔVout(s)=\begin{bmatrix}r_C&&1\end{bmatrix}\frac{1}{ω_n^2P(s)}
\left(
\begin{bmatrix}\frac{Duty}{L}s\\\frac{Duty}{LC}\end{bmatrix}ΔVin
+\begin{bmatrix}\frac{r_C}{L}s+\frac{1}{LC}\\\frac{r_C}{LC}-\frac{1}{C}\left(s+\frac{r_L+r_C}{L}\right)\end{bmatrix}ΔIo
+\begin{bmatrix}\frac{Vin}{L}s\\\frac{Vin}{LC}\end{bmatrix}ΔDuty
\right)
+\begin{bmatrix}0&&-r_C\end{bmatrix}\begin{bmatrix}ΔVin\\ΔIo\end{bmatrix}}$$
後ろのDU(s)は-rCΔIo(s)だけが残る。
$$\tiny{ΔVout(s)=\begin{bmatrix}r_C&&1\end{bmatrix}\frac{1}{ω_n^2P(s)}
\left(
\begin{bmatrix}\frac{Duty}{L}s\\\frac{Duty}{LC}\end{bmatrix}ΔVin
+\begin{bmatrix}\frac{r_C}{L}s+\frac{1}{LC}\\\frac{r_C}{LC}-\frac{1}{C}\left(s+\frac{r_L+r_C}{L}\right)\end{bmatrix}ΔIo
+\begin{bmatrix}\frac{Vin}{L}s\\\frac{Vin}{LC}\end{bmatrix}ΔDuty
\right)
-r_CΔIo}$$
[rc 1]を展開する。
$$\tiny{ΔVout(s)=\frac{1}{ω_n^2P(s)}
\left(
\left(\frac{r_CDuty}{L}s+\frac{Duty}{LC}\right)ΔVin
+\left(\frac{r_C^2}{L}s+\frac{r_C}{LC}+\frac{r_C}{LC}-\frac{1}{C}\left(s+\frac{r_L+r_C}{L}\right)\right)ΔIo
+\left(\frac{r_CVin}{L}s+\frac{r_CVin}{LC}\right)ΔDuty\right)-r_CΔIo}$$
整理する。
$$\tiny{ΔVout(s)=\frac{1}{ω_n^2P(s)}
\left(
\left(\frac{r_C}{L}s+\frac{1}{LC}\right)DutyΔVin
+\left(\frac{r_C^2}{L}s+\frac{r_C}{LC}+\frac{r_C}{LC}-\frac{1}{C}\left(s+\frac{r_L+r_C}{L}\right)\right)ΔIo
+\left(\frac{r_C}{L}s+\frac{r_C}{LC}\right)VinΔDuty\right)-r_CΔIo}$$
ωesr=1/Crcとする。
$$\scriptsize{ΔVout(s)=\frac{1}{P(s)} \left( \left(1+\frac{s}{ω_{esr}} \right)DutyΔVin
+\left(1+\frac{s}{ω_{esr}} \right)VinΔDuty
-\left(s^2LCr_C+s(L+Cr_Lr_C)+r_L\right)ΔIo \right)}\tag{14}$$
はい。終わりです。
この式を見てもらうとVin,Duty,Ioの微小変動に対して出力電圧がどう変化するか?を示している式になります。

各項を抜き出して伝達関数にする
(13),(14)式からΔVin,ΔDuty,ΔIoの項を抜き出せば、それぞれの入力に対するコイル電流、出力電圧の伝達関数を求めることが出来ます。
まずは出力電圧からやってみましょう。(14)式からそれぞれ抜き出します。
$$\small{\frac{ΔVout(s)}{ΔVin}=G_{vv}=\frac{1}{P(s)} \left( 1+\frac{s}{ω_{esr}} \right) Duty}$$
$$\small{\frac{ΔVout(s)}{ΔDuty}=G_{dv}=\frac{1}{P(s)} \left( 1+\frac{s}{ω_{esr}} \right) Vin}$$
$$\small{\frac{ΔVout(s)}{ΔIo}=G_{iv}=-\frac{1}{P(s)} \left( s^2LCr_C+s(L+Cr_Lr_C)+r_L \right)}$$
はい、出力電圧に関する伝達関数は以上です。
つづいてコイル電流に関する伝達関数を求めましょう。(13)式から
$$\small{\frac{ΔIL(s)}{ΔVin}=G_{vi}=\frac{C*Duty*s}{P(s)}}$$
$$\small{\frac{ΔIL(s)}{ΔIo}=G_{ii}=\frac{\frac{s}{ω_{esr}}+1}{P(s)}}$$
$$\small{\frac{ΔIL(s)}{ΔDuty}=G_{di}=\frac{C*Vin*s}{P(s)}}$$
ふぅー。やっと終わりました。はい、以上で本記事は終わりです。
スイッチングレギュレータの制御設計をしたり、動作モデルを作ったりするのに便利な知識です。導出過程は長々となりますが、意外と単純な計算の繰り返しです。それで一回解いてみると結構理解が深まりますので、一回解いてみるのがオススメです。
最後までお読みいただきありがとうございました!誰かの参考になれば幸いです。