みなさま、お疲れ様です。インバーターの勉強する記事5回目です。
1回目:【インバーター】バイポーラSPWM制御単相インバーターの動作原理
2回目:【インバーター】バイポーラSPWM制御単相インバーターのプラント伝達関数を計算する
3回目:【インバーター】バイポーラSPWM制御単相インバーターの動作をLTspiceで確認する
4回目:【インバーター】【インバーター】プラントGdiの周波数特性をLTspiceで確認する
5回目:【インバーター】単相インバーターの制御設計をしてみる(本記事)
6回目:【インバーター】単相インバーターのリップル電流の求め方
今回は制御設計をして、動きを見てみようと思います。
設計条件
| 項目 | 値 |
|---|---|
| 電源電圧 | 200V |
| 出力電圧 | 100VAC |
| 負荷抵抗 | 50Ω |
| スイッチング周波数 | 100kHz |
とします。
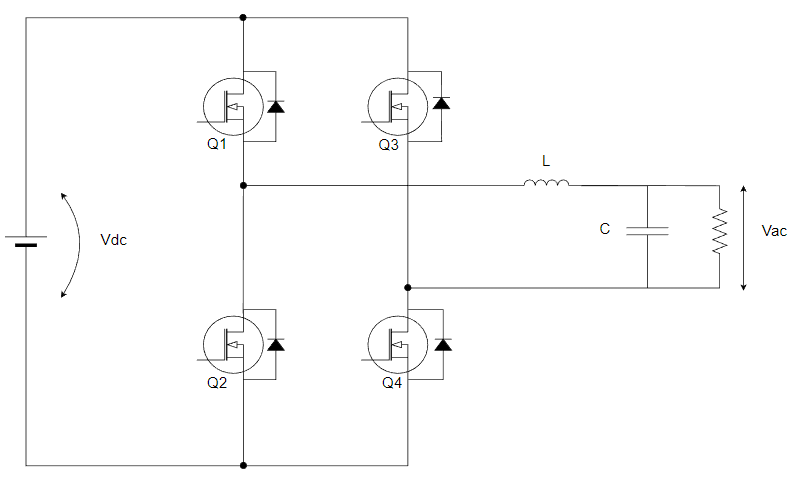
3,4回目で使用した回路図↓も流用します。
今まではオープンループで動作させていましたが、今回はフィードバックさせて動作確認してみたいと思います。
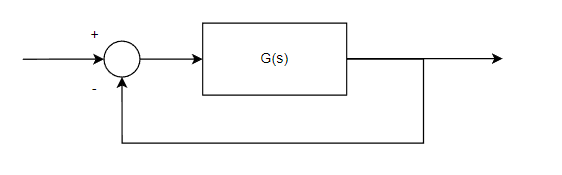
制御の全体像イメージ
制御のブロック線図を以下に示します。
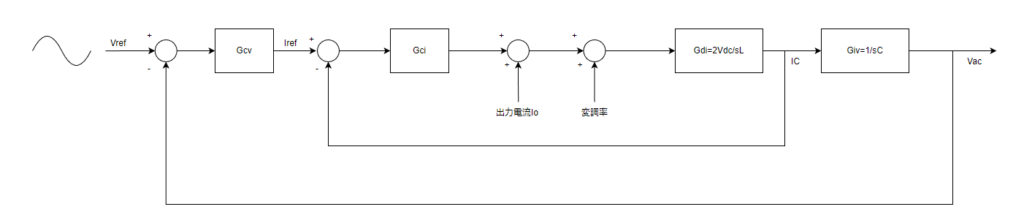
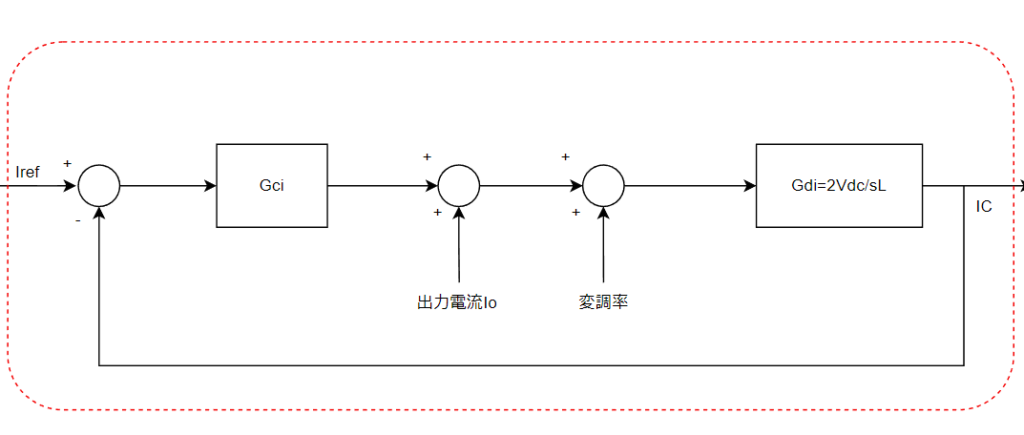
内側に電流制御のループがあります。Gciがコントローラーです。Gdiがプラントです。プラント伝達関数は2回目の記事で導出してみて、4回目の記事で確認しています。良かったら見てみて下さい。
外側に電圧制御のループがあります。
Gcvが電圧のコントローラーで、Givが電圧プラントです。
制御器はどうしたらいいの?って話ですが、こちらの論文のTable2-1によると”キャパシタ電流をフィードバックしたPR制御器”が良いとなってますね。
それにならって、今回はPR制御で考えてみます。
電流ループの設計
電流ループの設計をしてみます。制御器のPR制御(Propotional Resonant controller)は以下の伝達関数となります。
$$\small{
G_{PR}(s)=K_p+K_r\frac{2ζω_ns}{s^2+2ζω_n+ω_n^2}
}$$
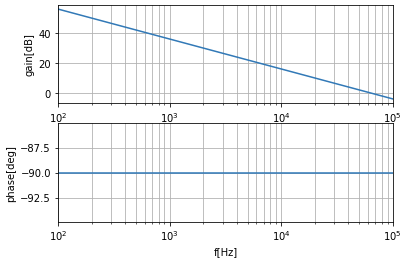
制御対象のGdi(s)の伝達関数は以下の通りです。
$$\small{
G_{di}(s)=\frac{ΔIL(s)}{ΔD(s)}=\frac{2V_{dc}}{sL}\\
}$$
4回目でこの式の通りになるのか?をLTspiceで確認しましたが、まぁだいたい合ってると結論になりましたので、この式で計算していきます。
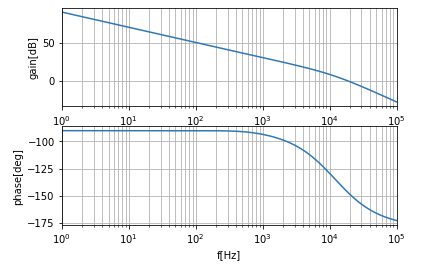
プラントの周波数特性を描くと以下の通りです。
クロスオーバー周波数=10kHzになるようにKpを調整し、ωn=2π60Hzに設定し、Krを適当に設定しました。
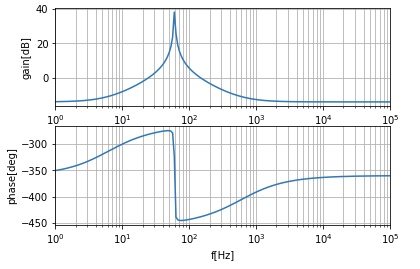
これを掛け算してGci*Gdiのボード線図を見てみると以下の通りです。
クロスオーバー周波数=10kHzになっており、位相余裕度が90deg確保できており、OKとします。
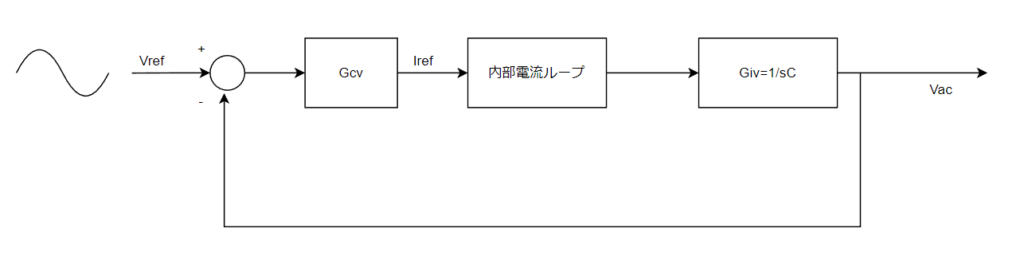
電圧ループの設計
続いて、電圧ループの設計をしてみます。電流ループとGivを直列したときの周波数特性を調べてみます。
電流ループはフィードバックなので、こういうブロック線図は↓
こうなります↓。
$$\small{
G(s)_{FB}=\frac{G(s)}{1+G(s)}
}$$
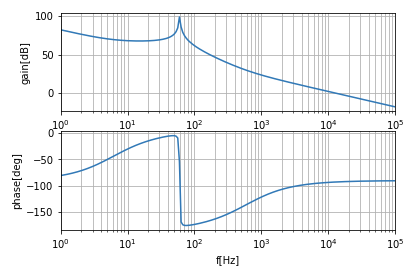
それに注意してG(s)_FBにGiv(s)を含めた周波数特性が以下となります↓。
電流制御ループのクロスオーバー周波数より小さく、基本周波数60Hzより10倍以上に設定してみます。
まぁクロスオーバー周波数=数kHzくらいを狙うイメージです。
それを踏まえて、(wn = 2π60、zeta = 0.01、Kp = 0.1、Kr = 100)としました。
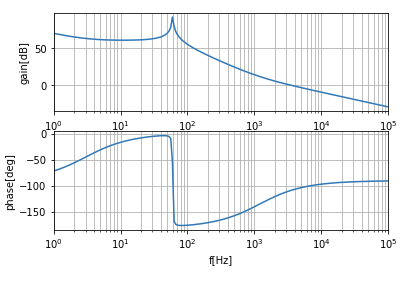
クロスオーバー周波数=3kHz、位相余裕度がまぁ60deg以上ありそうです。これでOKとします。
シミュレーションによる動作確認
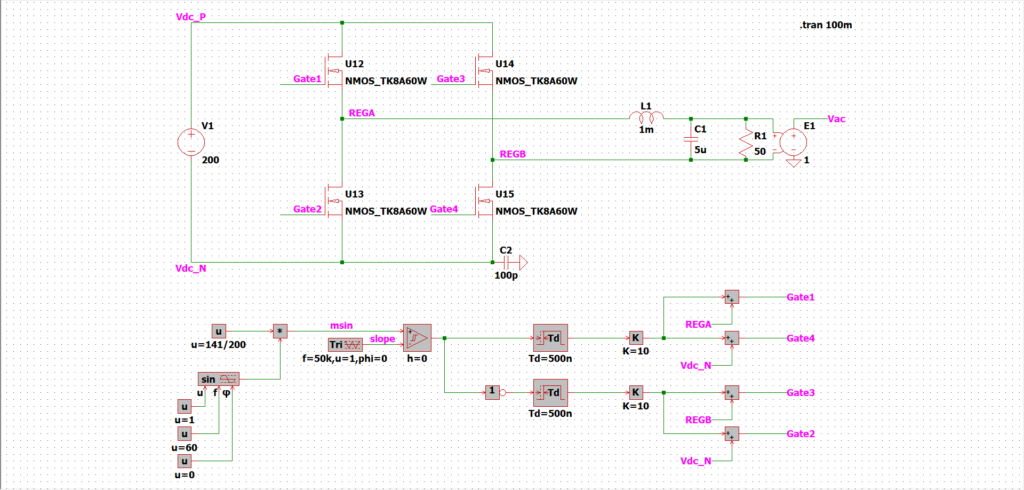
これで実際に動作確認してみます。確認用の回路図は以下です↓。
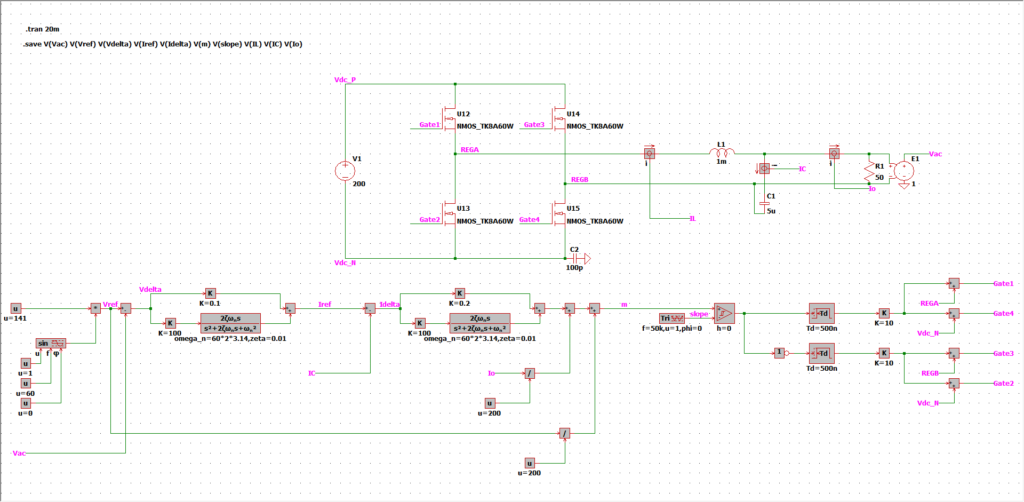
これシミュレーションにめちゃ時間かかりました。8時間くらい。
以下のシミュレーション設定のTrtolの値を弄ったり、modified trapにしたり、Alternateにしたり、しましたが、そんなに改善しませんでした。
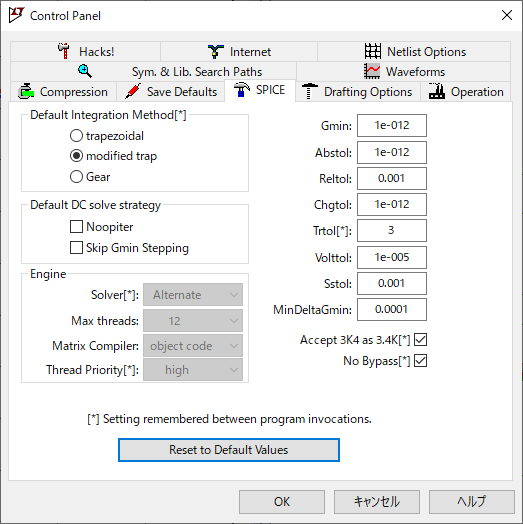
ゲート抵抗入れたりしてみましたが、速度は改善しなかったので、8時間くらいじっと待ちました。
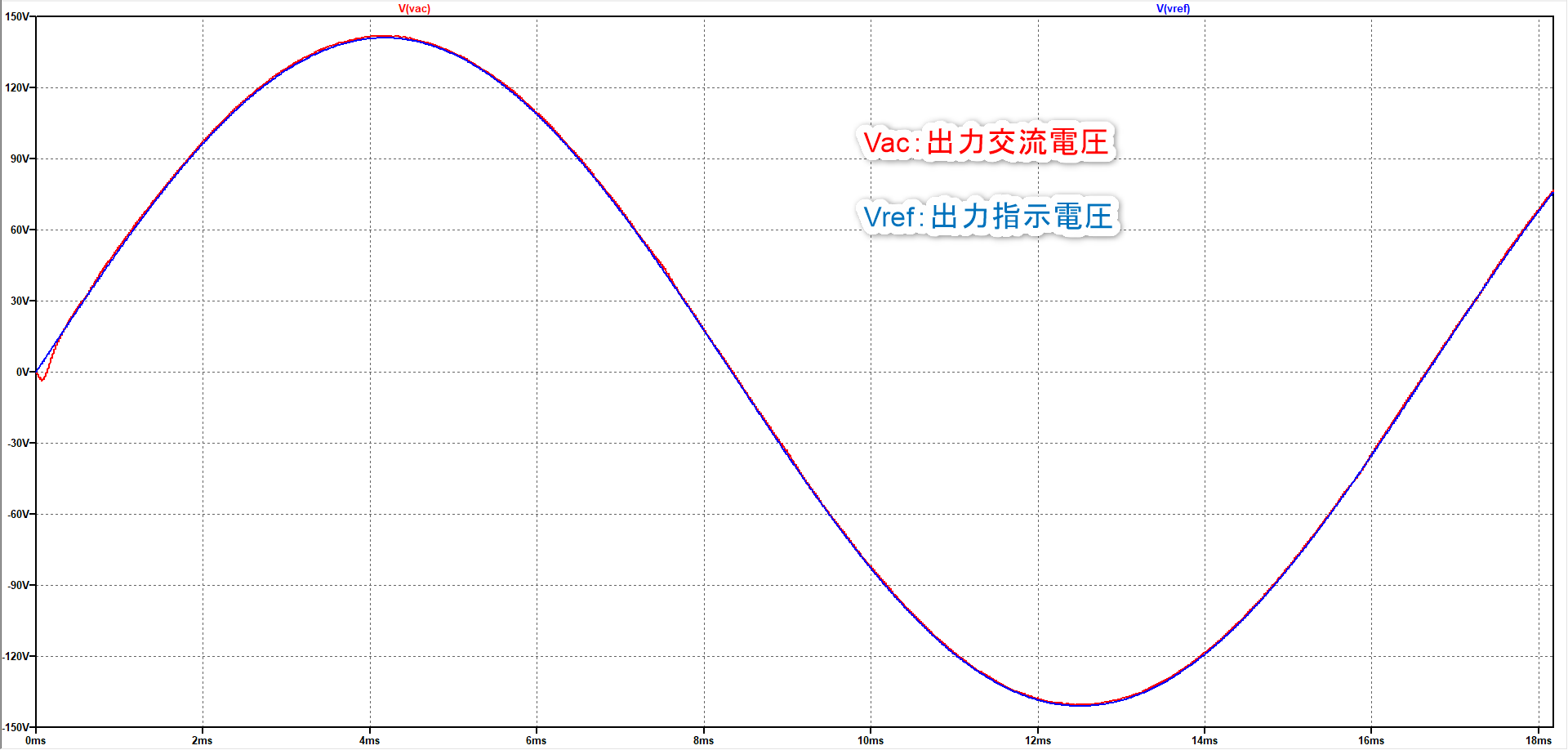
その波形が以下の通りです。
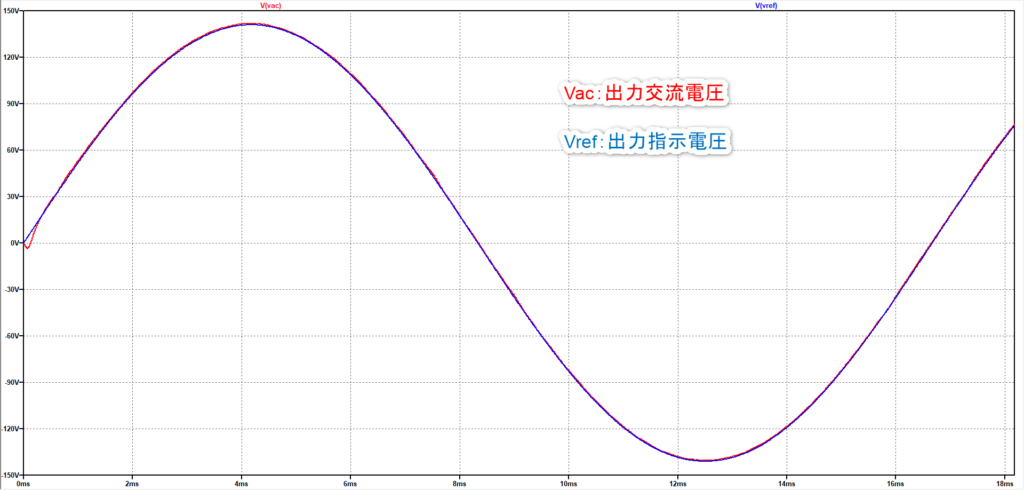
指示電圧(Vref)に出力電圧(Vac)が綺麗に追従している様子が見えるので、問題ないと思います。
はい、これで本記事は終わります。
誰かの参考になれば幸いです。最後までお読みいただきありがとうございました!!!
参考資料
Control Design of a Single-Phase DC/AC Inverter for PV Applications